谘詢電話
ENGLISH0755-88840386基於模糊 PID 控製的配料秤係統的實現
發布時間:2020-05-09 11:00:54 |來源:網絡轉載
- 引 言
傳統的配料皮帶秤係統通常采用 PID( 比例- 積分- 微分) 控製器來整定各參數, 在誤差較小的範圍內 PID 控製算法具有一定的優越性。但是在實際運行當中, 配料皮帶秤係統的準確度會受到各種因素的影響, 這些往往使得係統誤差不穩定, 動態特性不理想, 無法達到預期的控製效果。
本文提出了基於模糊 PID 控製器的配料皮帶秤係統, 將模糊控製技術與傳統的 PID 控製技術結合起來共同應用於係統的調節當中, 大大提高了係統抗外部幹擾和適應內部參數變化的魯棒性有效地解決了誤差不穩定、動態特性不理想的問題。
- 係統組成及工作原理
配料皮帶秤係統一般由 PLC 上位機、變頻器、振動給料機、配料皮帶、主皮帶、儀表等部件組成, 在配方給定的情況下, 儀表可以獨立對配比谈球吧app官方网站地址實施閉環控製和調節, 其中采用模糊 PID 控製算法進行調節, 算法內嵌於儀表當中。以配料係統中的一台皮帶秤為例, 控製方框圖如圖 1 所示。
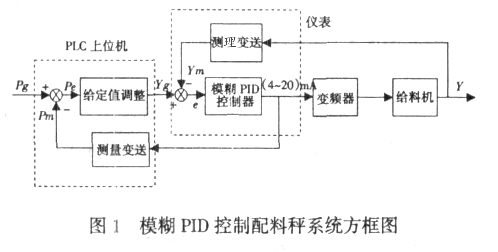
當皮帶以一定速度運行時, 稱重傳感器輸出的重量信號和測速傳感器輸出的速度信號進入儀表, 儀表經運算後得到皮帶秤的瞬時谈球吧app官方网站地址和累計谈球吧app官方网站地址。瞬時谈球吧app官方网站地址與儀表內設定的谈球吧app官方网站地址值進行比較, 其偏差經模糊 PID 運算後輸出 4 mA~20 mA 電流信號。該信號作為調節信號一路送往變頻器, 通過改變變頻器的頻率調節給料機的振動速度, 從而調節物料的谈球吧app官方网站地址, 達到配料的目的; 另一路信號送往 PLC 上位機, 上位機根據得到的信息實時調整儀表內的谈球吧app官方网站地址給定值。采用模糊 PID 控製器係統可以根據現場不確定的環境變化引起的實際係統誤差變化進行實時控製。

- 模糊 PID 控製器的設計
模糊 PID 控製器是當誤差較小時采用傳統的PID 控製, 而當誤差較大時采用模糊控製, 兩種控製方式並行使用, 由比較器進行切換。設 eg 表示大小偏差量的臨界值, 當|e|
3.2.2 模糊控製器的實現
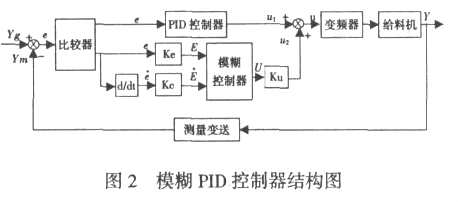
如圖 2 所示, 係統中將儀表給定谈球吧app官方网站地址 Yg 與儀表計算得到的瞬時谈球吧app官方网站地址 Ym 進行比較, 得到谈球吧app官方网站地址偏差e, 如果偏差較大時, 采用模糊控製。偏差 e 經微分後
-
- PID 控製器
PID 控製規律為:
得到偏差 e 的變化率e , e 和e 經過模糊量化推理後得到 E, E 作為模糊控製器的輸入, U為控製器的輸 出。其中 Ke, Kc 為量化因子, 是將輸入精確變量 e、e 由基本論域一一映射為相應的模糊集中離散整形值的一個增益, 其取值由兩個論域的範圍決定; Ku 為輸出控製量 U 的比例因子, 由於每次經模糊控製
出。其中 Ke, Kc 為量化因子, 是將輸入精確變量 e、e 由基本論域一一映射為相應的模糊集中離散整形值的一個增益, 其取值由兩個論域的範圍決定; Ku 為輸出控製量 U 的比例因子, 由於每次經模糊控製
算法得到的控製量 U 還不能直接控製被控對象, 必U(t)=kpe(t)
(1)須通過一比例因子將其轉換到控製對象所能接受的
式中: u (t)——PID 控製器的輸出信號;
e(t)——PID 控製器的輸入偏差信號;
KP——比例係數;
TI——積分時間常數, TI 越大, 積分作用越弱,
積分時間越長;
TD——微分時間常數。
PID 控製器采用一般的增量或數字算法, 其參數按常規整定。
-
- 模糊控製器
- 模糊控製原理
- 模糊控製器
模糊控製是一種基於規則的控製, 它采用語言型控製規則, 將現場操作人員的控製經驗或相關專家的知識變成計算機可以接受的控製模型, 讓計算機來代替人進行有效的控製[3]。模糊控製係統的基本結構如圖 3 所示。
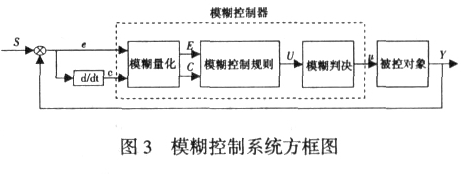
圖 3 中 S——係統的設定值,是精確量;
e, c——係統偏差與偏差變化率,是精確量, 它們是模糊控製器的輸入;
E, C——經模糊化處理後偏差與偏差變化率的模糊量;
U—— 模糊量的偏差與偏差變化率經模糊控製規則、近似推理處理後, 得到模糊量的控製作用;
u——模糊量的控製作用經模糊判決後得到的精確的控製作用來控製被控對象;
Y——係統的輸出。
基本論域中去, 其取值由控製量 U 的模糊集和實際對象的控製量大小來決定。
( 1) 模糊量化: e、e , 分別為偏差與偏差變化率,
u 為輸出, 取其基本論域為:
E=[- 15, +15] E =[- 10, +10] U=[- 20, +20]
將上述基本論域量化為模糊集論域:
E&X={- 6, - 5, - 4, - 3, - 2, - 1, - 0, +0, +1, +2,
+3, +4, +5, +6}
E &Z={- 6, - 5, - 4, - 3, - 2, - 1, 0, +1, +2,
+3, +4, +5, +6}
U&Z={- 6, - 5, - 4, - 3, - 2, - 1, 0, +1, +2
+3, +4, +5, +6}
誤差 e 的量化因子 Ke=6/10=0.4;
誤差變化率e 的量化因子 Kc=6/10=0.6;
控製量變化 u 的比例因子 Ku=6/20=0.3。
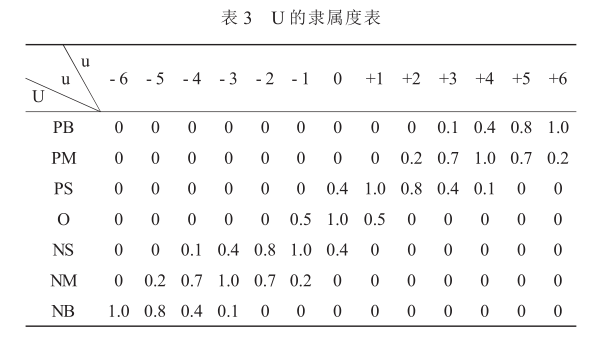
( 2) 確定模糊子集及隸屬度表: 設 A, B, C 分別為 X, Y, Z 的模糊子集
A={PB, PM, PS, PO, NO, NS, NM, NB}
B={PB, PM, PS, O, NS, NM, NB}
C={PB, PM, PS, O, NS, NM, NB}
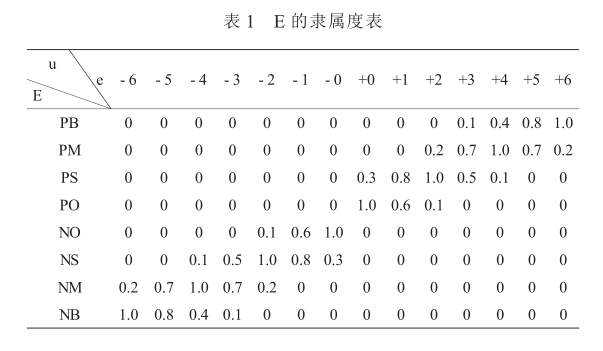
選取隸屬函數為正態分布時, 對模糊子集 A, B, C 確定其量化論域中各元素的隸屬度如表 1、表2、表 3 所示。
( 3) 根據振動給料機操作經驗, 總結出模糊控製規則表如表 4。
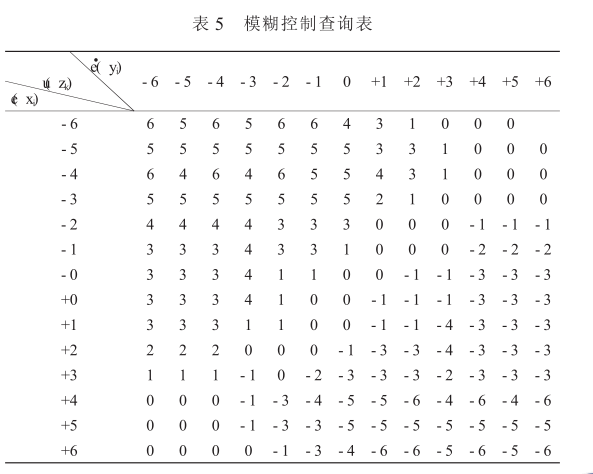
(4)由於模糊集合 E 有 14 個元素, E 有 13 個元素, 因此
可求得輸出語言變量 U 的模糊子集 Uij 有 14×13= 182 個。根據上麵得到的模糊子集 Uij, 應用加權平均法對其進行模糊判決, 可以得到相應的控製量 u, 進而得到整個模糊控製查詢表, 如表 5 所示。



對於表 4 中的 7×8=56 條控製規則均對應一個模糊關係, 因此我們可以得到 52 個模糊關係:
R 1=[(PM) EX( PM) E! ]T×( NM) U
R 2=[(PB) E×( PS) E! ]T×( NB) U
┇
R 51=[(NB) E×( NS) E! ]T×( PB) U
R 52=[(NB) E×( NE) E! ]T×( PM) U
(2)通過對這 52 個模糊關係R(i i=1, 2, 3, 52) 取 “並”運算, 可以得到配料係統模糊控製規則總的模糊關係R : R=R1∨R2∨ ∨R50∨R51∨R52=%Ri
( 3)
利用合成推理規則得模糊集合 U 的子集:
將上述的控製查詢表存貯在計算機中, 在每控製周期, 計算機將采集到的實際誤差 e( k)
( k=0, 1, ) 和通過計算得到的誤差變化 e( k) - e ( k- 1) 分別乘以量化因子 Ke, Kc, 然後取得上表中的 e( i) , e( j) , 查詢模糊控製規則表中第 i 行第 j 列對應的控製量 u( z) , 再乘以比例因子 Ku 得到實際控製量的變化值, 通過控製變頻器達到控製物料谈球吧app官方网站地址的目的。
- 結束語
基於模糊 PID 控製器的配料秤係統最大的優點就在於可以根據係統偏差的大小變化采用 PID 控製與模糊控製相結合的方法控製係統的輸出, 可以有效地適應現場環境的變化和係統自身結構的改變等因素造成的影響, 有效地解決係統誤差變化的問題, 保證係統工作的準確性與穩定性。作為衡器發展的前沿產品, 該係統可以代替企業中陳舊的配料工藝設備, 很大程度地降低勞動強度, 提高產品質量和生產效益。
本文源於網絡轉載,如有侵權,請聯係刪除
- 上一篇:鏈板式配料秤在水泥行業中的應用
- 下一篇:配料秤原理及準確度的探討
-

公司電話:
0755-88840386
-

公司地址:
深圳市龍崗區阪田街道龍璧工業區11棟6樓
-

公司郵箱:
longxin@szshunyoufa.com
微信:產品谘詢

關注視頻號

關注抖音號